La arqueología submarina no difiere de la terrestre en objetivos ni principios. Por el contrario, el medio acuático impone determinadas limitaciones muy particulares que obligan a adaptar las técnicas de búsqueda. Antes de iniciar una excavación arqueológica, el IEASM emplea un enfoque sistemático original y no intrusivo de los yacimientos del entorno marino tras una prospección geofísica.
La prospección arqueológica submarina se efectúa con ayuda de diversos sensores que miden las características físicas del medio y están orientados a poner de manifiesto anomalías susceptibles de ser vestigios. En este proceso, un barco equipado con instrumentos de medición y sistemas informáticos de adquisición y tratamiento recorre la zona de búsqueda trazando líneas rectas y paralelas, denominadas perfiles, con una separación de entre 30 y 80 m en función de la profundidad media del yacimiento, el tamaño y la naturaleza de los vestigios.
Esta embarcación se posiciona en tiempo real a través de un sistema de posicionamiento global diferencial (DGPS). Gracias a un cabestrante eléctrico, el barco remolca varios magnetómetros de resonancia magnética nuclear (RMN) y un sonar de barrido lateral por la superficie de las zonas de menor profundidad o sumergidas por depresores hidrodinámicos en las aguas más profundas. Posteriormente, un sistema de posicionamiento acústico emite de forma continuada la posición relativa de los sensores remolcados.
Este barco cuenta además con ecómetros de alta definición. Todos los parámetros registrados se someten a un primer análisis en tiempo real durante la prospección. Gracias al procesamiento diario de los datos, es posible crear mapas batimétricos (relieve del fondo marino) y magnetométricos (campo magnético) de la zona inspeccionada y, posteriormente, completarlos gracias a una imagen tomada con el sonar de fondo (fotografía acústica). Las técnicas de análisis geofísicos consisten en poner de manifiesto las discontinuidades de los parámetros medidos, como el campo magnético del entorno o la respuesta acústica de los terrenos. Estas discontinuidades o contrastes se denominan anomalías.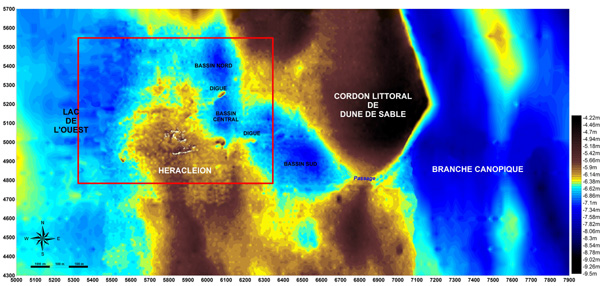
Mapa batimétrico de la zona de Tonis-Heraclion.
En las aplicaciones arqueológicas, la amplitud de las anomalías más interesantes es especialmente débil. Por lo general, se entremezclan con numerosas anomalías geológicas naturales que también miden los sensores y que se deben «discriminar». La eficacia de esta discriminación se basa en la sensibilidad de los sensores y en su configuración de aplicación, en el tratamiento de los datos y en el análisis correlativo de los resultados de medición obtenidos en diversos instrumentos. La primera inspección visual de los sondeos submarinos corre a cargo de un equipo de buzos experimentados o un conjunto de robots configurados para identificar la causa de la anomalía medida.
Los magnómetros RMN
Los principales sensores del sistema de prospección del IEASM son los magnetómetros de resonancia magnética nuclear. La Comisaría de Energía Atómica (CEA) de Francia ha desarrollado estos sensores de alta sensibilidad. La tecnología de estos magnetómetros RMN se fundamentan en una doble resonancia magnética de protones y electrones (efecto Abragam-Overhauser), por lo que son capaces de medir el valor absoluto del campo magnético terrestre más de mil veces por segundo con la precisión de cincuenta millonésimas de su valor.
La teoría.
La sonda es un convertidor de campo/frecuencia basado en el principio de resonancia magnética nuclear amplificado a través de una polarización electrónica dinámica. Los átomos de hidrógenos de los disolventes estándar tienen un momento magnético proporcional a su espín (movimiento magnético). Al verse expuestos a un campo magnético terrestre, realizan un movimiento de precesión alrededor de este campo a una frecuencia proporcional a su módulo (denominada frecuencia de Larmor, de entre 1 KHz y 3 KHz en el campo magnético terrestre). La excitación electromagnética de la resonancia crea, por la coherencia de la fase de espín, un componente magnético macroscópico de precesión de Larmor. Este componente induce una tensión alternativa en la bobina de detección. La frecuencia medida otorga, por tanto, el valor del campo magnético. El magnetismo nuclear que se genera de esta forma no es directamente detectable en la medición del campo magnético terrestre. La polarización electrónica y dinámica amplifica la señal nuclear en un factor de 1000. Los espines nucleares se emparejan con los espines de electrones libres de un radical en solución.
En este momento, es posible obtener dos frecuencias de excitación de la resonancia electrónica: una genera una polarización positiva y la otra genera una polarización negativa. Las frecuencias dependen del disolvente empleado. Una adecuada elección de un par de disolventes con el mismo radical arrojará la misma frecuencia: un factor de polarización positivo en uno de los disolventes y un factor de polarización negativo en el otro. Con esto, nos referimos al doble efecto Abragam-Overhauser. La sonda está formada por dos disolventes hidrogenados ubicados en sendos frascos que contienen un radical libre en solución, un circuito de excitación de la polarización dinámica a alta frecuencia y un circuito de baja frecuencia que, de manera respectiva y simultánea, excita la resonancia nuclear y mide la señal. Por tanto, la sonda cuenta asimismo con dos bobinas simétricas montadas de forma opuesta.
Geomagnetismo.
El campo magnético terrestre superpone los fenómenos complejos en el tiempo y el espacio (geología de la corteza, efecto dinamo, interacción entre el sol y la tierra, circulación de las corrientes ionosféricas y telúricas, etc.) en los que intervienen las propiedades magnéticas y eléctricas. Así, el campo magnético terrestre puede considerarse, de manera esquemática, bipolar y con un valor comprendido entre 20000 nanotesla (nT) en el ecuador, y de 60000 nT en los polos, al que se debe añadir un campo de anomalías mundiales (del orden de 10000 nT), un campo de anomalías locales de origen geológico y de fenómenos transitorios del orden de varias decenas de nanoteslas por cada 24 horas.
Aplicación en la arqueología.
Las anomalías magnéticas provocadas por los vestigios arqueológicos se superponen a estas anomalías de origen natural. La discriminación de todas estas anomalías se basa en la elevada sensibilidad de los magnetómetros y, en caso necesario, en la medida del gradiente magnético local entre dos sensores remolcados de forma simultánea. Este gradiente reduce las variaciones temporales del campo magnético terrestre en tiempo real y autoriza el descarte de una gran parte de las anomalías geológicas.
Este método, implantado con magnetómetros RMN, permite detectar objetos con baja carga magnética, incluso enterrados a gran profundidad bajo los sedimentos. En la bahía de Abukir, la prospección del área de búsqueda (110 km2) requiere, por cada red de 10 m, 22000 km lineales. Además, esta cobertura magnética responde a necesidades particulares: las líneas de trazado de los detectores magnetométricos, y por tanto del barco, deben ser rectas y paralelas, a una velocidad constante y una orientación permanente sin sufrir variaciones bruscas de elevación. En definitiva, solo es posible obtener resultados satisfactorios en condiciones meteorológicas excepcionales.
El sonar de barrido lateral
Este sensor ofrece una imagen acústica del fondo marino en un rango que oscila entre los 50 y 150 metros a ambos lados del barco. Así, detecta los cordones rocosos y otros objetos prominentes que descansan en el fondo, y puede ayudar a determinar su tamaño mediante la medición de la sombra que proyectan. Por lo tanto, permite tomar imágenes acústicas del fondo marino según la reflectividad de los sedimentos. Hay varios parámetros que ayudan a determinar los diferentes tipos de sonar de barrido lateral, como la frecuencia acústica, la profundidad, la anchura del haz (vertical u horizontal), la duración y la cadencia del impulso. Se fija un transductor a un cable enganchado en el barco para permitir la emisión de ondas sonoras de forma perpendicular a la dirección del barco y, cuando alcanzan el fondo del océano, se reflejan para ser posteriormente captadas por el transductor. En función del nivel de reflectividad, que dependen del tipo de sedimentos, se registran varias ondas. Un fondo irregular tiene un nivel de reflectividad menor que un fondo arenoso (liso). Los obstáculos y las irregularidades del terreno impiden la reflectividad de las ondas sonoras y, a su vez, forman sombras sobre los promontorios. La imagen electrónica que se obtiene muestra el relieve del fondo marino.
La ventaja del sonar de barrido lateral es su enorme capacidad de cobertura de la zona analizada. No obstante, no permite definir con precisión los fenómenos detectados. Los magnetómetros también pueden determinar si estos objetivos son magnéticos o no. El tratamiento de los datos obtenidos del sonar propicia la elaboración de mosaico de la zona investigada mediante la yuxtaposición de bandas posicionadas geográficamente.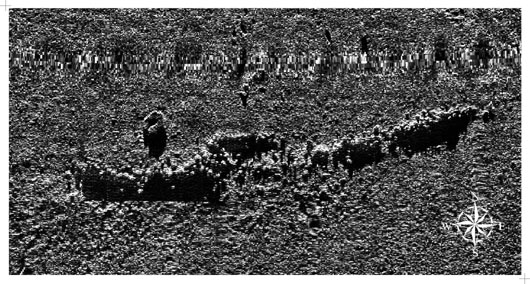
Imagen tomada con el sonar de barrido lateral del muro sur del templo de Tonis-Heracleion y la construcción circular.
Ecómetro
El uso de ecómetros permite elaborar un mapa batimétrico preciso del relieve marino. Estos sensores acústicos ofrecen una medición continuada de la profundidad de los perfiles de prospección. Así, permiten definir un mapa del relieve del fondo sumergido. Este tipo de documentos sirve para mostrar la topografía antigua: los ligeros desniveles con contornos imprecisos pueden corroborar antiguas dársenas portuarias, mientras que las posibles lomas revelan en ocasiones antiguas líneas de bloques de construcción. Se ha llevado a cabo un exhaustivo proceso de cobertura batimétrica en toda la zona con una red de 20 o 40 m, en función del interés arqueológico de la zona.